Laboratoire d'Informatique de Grenoble UMR 5217
Grenoble Informatics Laboratory
Grenoble Informatics Laboratory

Instrumented car

Descriptions:
Présentation de la plate-forme cette plate-forme est constituée d’un véhicule Hybride Lexus équipée de nombreux capteurs:
- 2 télémètres lasers
- caméra stéréoscopique et 1 caméra couleur haute résolution
- centrale inertielle et GPS
- Connection au buscan du véhicule pour accéder aux données internes (odométrie, clignotants, etc.)
En outre le véhicule est équipé d’un PC doté d’une carte graphique puissante pour opérer les algorithmes de perception en temps réel.
Cette plate-forme permet d’expérimenter de nouveaux algorithmes de perception d’environnements dynamiques complexes tels que des scènes urbaines ou des scène autoroutière. Ses objectifs à plus long termes consistent à développer des logiciels d’aide au conducteur, telles que l’anticipation de collision, ou des systèmes de conduites autonomes. Amaury Nègre est en charge de la maintenance de cette plate-forme et de la couche logicielle de l’équipe e-Motion sur la perception embarquée.
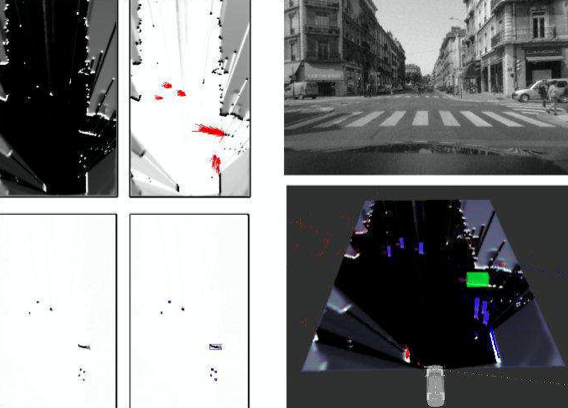
Développements récents Les développements récents ont porté principalement sur la perception bas-niveau et son intégration dans le middleware robotique ROS, ainsi que sur l’implémentation sur carte graphiques. Les principaux modules de perceptions développés sont les suivants :
- Construction de grille d’occupation par caméra stéréo
- Construction et fusion de grille d’occupation multi-laser
- Module de suivi visuel de lignes de marquage au sol
- Filtre d’occupation bayésien à échantillonnage hybride
- Prédiction de changement de voie
- Prédiction de collision
- Estimation du risque de collision au niveau d’intersection
Ces briques de perceptions sont utilisées par différents modules de prédictions :
Par ailleurs, dans le cadre du projet Perfect de l’IRT Nanoelec, nous travaillons sur le portage des algorithmes sur des architecture matérielles embarqués à faible coût et faible consommation d'énergie.
UMR 5217 - Laboratoire LIG - Bâtiment IMAG - 700 avenue Centrale - Campus of Saint-Martin-d’Hères
Postal address: CS 40700 - 38058 Grenoble cedex 9 - France
Tél. : +33 4 57 42 14 00


